
(Original title: Trying to uncover the veil of Boston Dynamics' new release of Atlas - Technical Analysis behind it)
Lei Feng network: According to the author of this article Duan Jinjun, Southeast University Automation Institute of Intelligent Robot Bo fourth graduate students, the original first known in the know, Lei Feng authorized reproduction.
On November 16th, 2017, a video of Atlas jumping, spinning, and backflip almost surprised the entire robot circle. Various major media outlets reported on it. How do I view the newly released Android Atlas video from Boston Dynamic 2017.11.16? In expressing feelings, of course, only feelings are not enough. As a technical engineering man, we should think more about what technology is behind it.
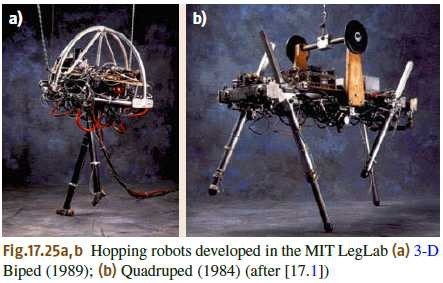
Still feelings: BD's video can be said to be freezing cold, and if you don’t believe it, let’s take a look at this video: let robot in MIT MIT’s Leg Lab’s early work with one-footed feet Four-legged jumping robot, more research results and videos can be seen: MIT Leg Laboratory. This is a story from thirty years ago. If you want to understand the current BD, check out this website: Boston Dynamics is changing your idea of ​​what robots can do. | Boston Dynamics.
In recent years, BD products are still numerous, including Handle, SpotMini, Atlas, Spot, LS3, WildCat, BigDog, SandFlea, and RHex. For details, see Boston Dynamics | Boston Dynamics. There is also a great god in Zhihuzhong who explained what kind of company Boston Dynamics is.
BD was founded by Marc Raibert (Marc Raibert - Wikipedia) after leaving MIT LegLab. Marc Raibert founded Leg Lab in CMU in 1980, left CMU in 1986 and went to MIT until 1995. In 1992, he founded Boston Dynamic, a simulation and robotics company. After the establishment of the company, they served a number of military agencies including the Defense Advanced Research Projects Agency (DARPA), and even received tens of millions of dollars of investment from the Department of Defense. At this time, BD and Gill Pratt are inseparable links, Gill Pratt is a student of Marc Raibert. Gill Pratt is the head of the former DARPA Robotics Challenge. Therefore, it is reasonable for BD to always get DARPA investment. BD was acquired by Google in 2013, but Toyota announced that it would take over Google’s BD in 2016 (Toyota took over the six major causes of Google’s Boston power - the 100). At this time, Gill Pratt left DARPA and is a Toyota Research Institute. (TOYOTA Research Institution, TSI). Afterwards, the news broke. In 2017, BD was acquired by SoftBank.
Returning to the book, after an overview of the BD, here is a review of Atlas's classic action - Backflip.
Before introducing the technique of Atlas backflip, first introduce some preliminary knowledge.
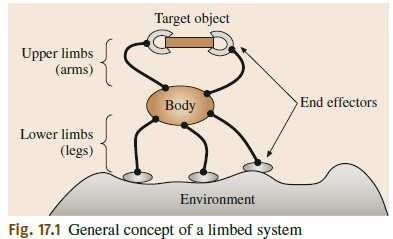
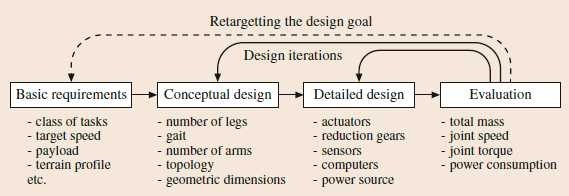
1. Atlas belongs to a type of the Limbed system (P419-441 of the Spring Handbook of Robotics), put a few pictures.
 iOwEHFCw3qXiTCOj30Tiko2d3U1511097870405.jpg" />
iOwEHFCw3qXiTCOj30Tiko2d3U1511097870405.jpg" />




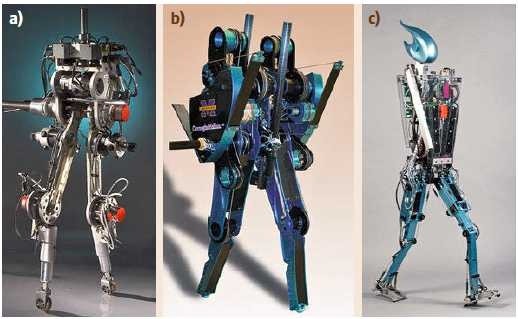

2. Further refinement, Atlas belongs to Legged Robots (P1203-1263 of Spring Handbook of Robotics).
The difficulty of Altas is not the action of backflip. The difficulty is the movement planning before the backflip and the control after touching the ground (for example, how to maintain balance, how to control contact force, etc.). (One of the major difficulties in making a legged robot walk or run is keeping its balance: where should the robot place its feet, how should it move its body in order to move safely in a given direction, even in case of strong perturbations? This difficulty comes from the fact that contact forces with the environment are an absolute necessity to generate and control locomotion, but they are limited by the mechanical laws of unilateral contact).
1)The Dynamic of Legged Locomotion
The key to Atlas is dynamic modeling. Generally, a model is built according to Lagrangian and Newton and Euler.
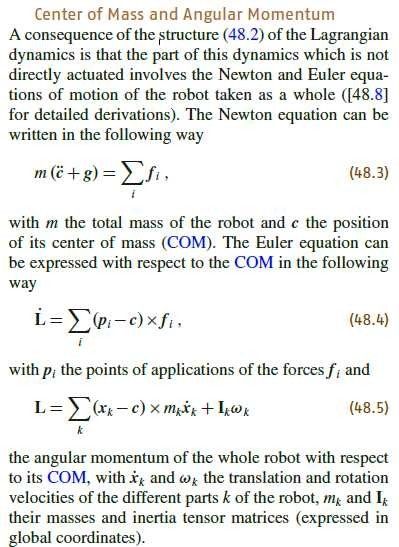
The above passage can explain that backflips are actually not difficult, as explained below:
In Flight Phases, Atlas is not in contact with the environment, so there is no contact force f_i, at which point Newton's equation simplifies to:
The process in the air is actually a parabola movement, so there is no way to change Atlas's movement in the air. The Euler formula in the above formula can be simplified as:
In this case, Atlas can control the movement of the joints as well as the overall rotation, provided that it is before landing.
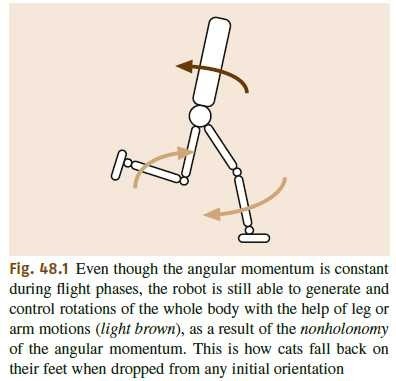
In summary, during the air movement, Atlas can not change the movement, but can change the posture, that is, the back flip or front flip and other complex actions, as long as the action can be completed before landing, of course, need to do a gait before jumping Planning of sports and others.
2)In Contact with the Ground
The contact surface includes flat ground or multiple surfaces. The contact surface in the video is approximately flat. If multiple surfaces, the control will be more complicated.
No matter what kind of contact surface, the momentary contact force when Atlas is in contact with the ground is very large. Therefore, there are very high requirements for the motor. BD is very clever and uses hydraulic servo control. If it is a motor, it may explode in minutes. Even hydraulic servo control considers active or passive compliance control.
Individuals feel that the balance after landing is relatively simple compared to walk or run. If the balance in walk or run can be controlled, the balance after landing may be relatively easy, but after the jump, it is in contact with the ground. Force control becomes a difficulty.
The design of time in the air is particularly important. If the time is short, Atlas can't complete the flipping action; if it's a long time, Atlas needs to constantly adjust the posture to ensure a balanced action before touching the ground.
Of course, the whole process is not so simple. References are given below. Interested friends can peruse the following content (P1206-1263 of Spring Handbook of Robotics).
1 In Contact with a Flat Ground: The Center of Pressure. In Contact with Multiple Surfaces.
2 Contact Models.
3 Compliant Contact Models.
4 Rigid Contact Models.
5 Hybrid and Nonsmooth Dynamics.
6 Stability Analysis - Not Falling Down.
7 Generation of Dynamic Walking and Running Motions.
8 Motion and Force Control.
9 Towards Move Efficient Walking.
10 Diffenert Contact Behaviors.
The content is too much, and it is impossible to explain it clearly through an article. Therefore, only the general explanation and content are given, and the effect is given.
References: Siciliano B, Khatib O. Springer Handbook of Robotics [J]. Springer Handbook of Robotics, 2016.