
Like the robot "big white" in the Hollywood blockbuster "Super Marines", "flexible" robots (Softrobots) have many advantages. But flexible robots often have a problem - they are too slow!
The artificial muscle that controls the "flexible" robot to perform various predetermined actions is called an actuator. Existing actuators are usually driven by hydraulic or pneumatic pressure and have the disadvantages of slow response and difficult energy storage.
The dielectric elastomer can be used as a flexible material with good insulation properties instead of a pneumatic actuator. However, existing dielectric elastomers require complex and inefficient circuits to provide high voltages, as well as rigid components to maintain their shape - both of which are contrary to the original intention of flexible robots.
Now, researchers at Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have developed a new type of dielectric elastomer, and in Advanced Materials (Advanced) Materials) published their research results.
This new material requires very low voltage support and allows for a wide range of motions without the need for rigid components.
“We think this material has the potential to be an ideal material for making flexible robots,†said Mishu Duduta, a graduate student at SEAS and the first author of the paper. “Power is easy to store and deliver, but before The problem is that the electric field required to drive the flexible robotic actuator is too strong. Our research has successfully solved many problems in the field of flexible actuators by reducing the drive voltage, increasing the energy density, and removing rigid components."
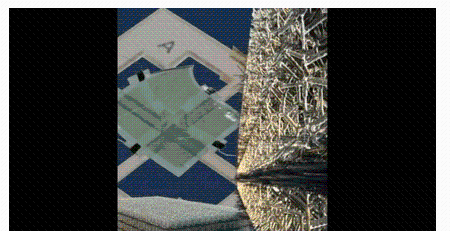
The figure shows an artificial muscle made using a soft, malleable elastomer and carbon nanotube electrode sandwich structure. Such actuators are applicable to the manufacture of flexible components for wearable devices, flexible clamps , surgical tools, flexible robots, and other robots. Image copyright: PeterAllen/HarvardSEAS
Dututa's co-authors include Robert Wood, a professor at the School of Engineering and Applied Science at Harvard University, and David Clarke, a professor of materials science. In the development of the new dielectric elastomer, Dututa's team combined two existing materials that performed well when used alone. One is based on the results developed by the University of California, Los Angeles (UCLA) and developed without the use of rigid structures, and the other is the carbon nanotube electrode developed by Clark Labs. The properties of the two materials complement each other, which in turn makes the performance of the new material superior to conventional dielectric elastomer actuators.
Ipad Battery,Ipad Air Battery,Ipad Pro Battery,Ipad Replacement Battery
Shenzhen Sunwind Energy Tech Co.,Ltd , https://www.sunwindbatterylm.com